
 Bei dem nachfolgenden Bericht handelt es sich um ein Open Source Projekt für Rasenmähroboter, dem Ardumower.
Bei dem nachfolgenden Bericht handelt es sich um ein Open Source Projekt für Rasenmähroboter, dem Ardumower.
Die Preise für industrielle Mähroboter dürften ja jedem bekannt sein. Mir ist das einfach viel zu heftig und so bin ich auf der Suche nach irgendwelchen brauchbaren Selbstbauanleitungen auf die Seiten von Ardumower gestoßen.
So einen Roboter wollte ich schon immer mal bauen, habe mich aber nie daran gewagt. Es kam mir einfach zu kompliziert vor.
Nach einigen Mails mit den Entwicklern von Ardumower, entschloss ich mich dann jedoch, als „Nachbau-Versuchskaninchen“ her zu halten.
Vorweg, ich habe es nicht bereut und würde es wieder tun.
Auf das eigentliche Projekt mit all seinen Einzelheiten, möchte ich hier nicht eingehen. Dies ist alles auf den Seiten von Ardumower beschrieben. Das Projekt ist noch lange nicht abgeschlossen und ständig in Bewegung. Daher lohnt sich ein regelmäßiger Besuch der Entwicklerseiten.
Nachfolgendes Projekt wurde eingestellt und wird nicht weiter betrieben!
Ich möchte nachfolgend lediglich kurz meinen Umbau vorstellen. Einen ausführlichen Bericht darüber gibt es HIER. Dort sind auch so einige „Hürden“ beschrieben, die man als Roboterbau-Anfänger halt so meistern muss.
Als Grundlage diente mir ein Ambrogio L50, in der Ausführung mit Absturzsensoren oder auch Treppensensoren genannt, welchen ich recht günstig erwerben konnte.
Dieser kleine Kerl ist echt bewundernswert. Unser Grundstück ist sehr hügelig und es gibt einige Hänge zu erklimmen, was er begeisternswert meistert. Dies ist nicht zuletzt dem Allradantrieb zu verdanken.
Leider ist der Kleine nicht wirklich für das autarke Mähen bei solchen Grundstücksvoraussetzungen geeignet. Die Absturzsensoren bieten keinen 100prozentigen Schutz und so musste doch so mancher Hechtsprung eingelegt werden, um den Mäher nicht mal einige Etagen tiefer wieder zu finden.
Weiterhin sind Grassensoren zwar schön, doch leider erkennt er auch Gestrüpp, Blätter und anderes Grünzeugs als Gras. So muss halt auch mal das Blumenbeet dran glauben oder er verfängt sich unter einem Busch.
Gibt es auf dem Rasen vertrocknete Stellen, so reagieren die Sensoren und er mäht in eine andere Richtung. Vollständiges Mähen der Rasenfläche ist somit fast unmöglich. So drängte sich der Umbaugedanke immer mehr auf und wurde umgesetzt.
 Damit man mal sieht, um „wen“ es sich handelt.
Damit man mal sieht, um „wen“ es sich handelt.
Hier schon der teils umgebaute Roboter.
.
 Hier die original Platine. Sie musste der Ardumower Technik weichen.
Hier die original Platine. Sie musste der Ardumower Technik weichen.
.
.
.
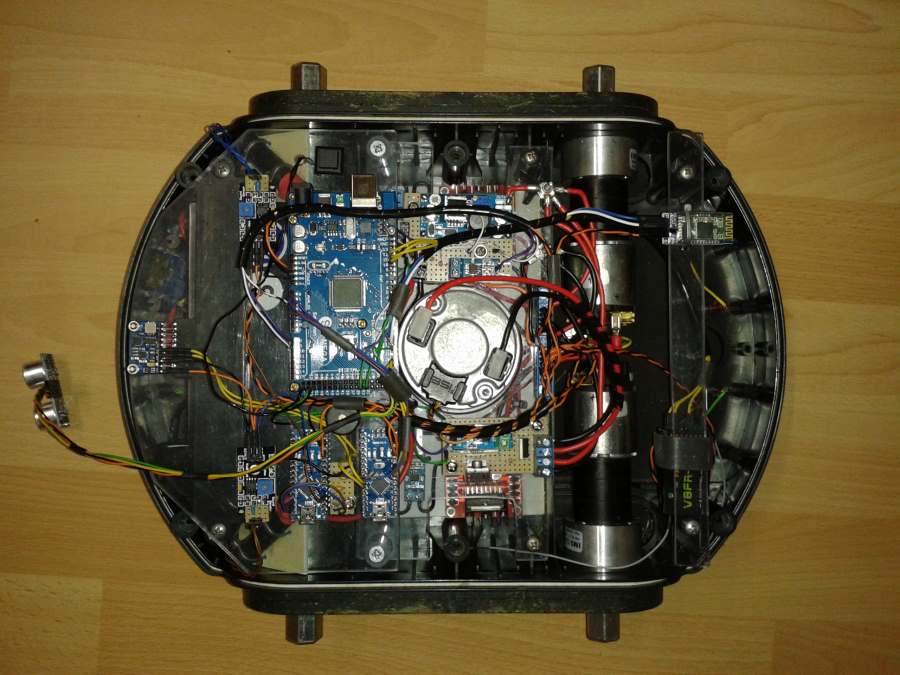
 Da beim Ardumower mehrere Komponenten untergebracht werden müssen, habe ich drei „Etagen“ geschaffen. Die unterste (im Bild weiß) ist die, der Original-Platine. Dort sind die beiden Motortreiber (rechter und linker Motor) und die Stromsensoren für diese untergebracht. Die Etage darüber trägt die Spannungsversorgungsbausteine und die Drehzahlregelung für den Mähmotor. Die dritte Ebene (ganz hinten, oberer Bildrand) beherbergt die „Gehirne“ des Roboters und das Kompass-Beschleunigungs-Modul.
Da beim Ardumower mehrere Komponenten untergebracht werden müssen, habe ich drei „Etagen“ geschaffen. Die unterste (im Bild weiß) ist die, der Original-Platine. Dort sind die beiden Motortreiber (rechter und linker Motor) und die Stromsensoren für diese untergebracht. Die Etage darüber trägt die Spannungsversorgungsbausteine und die Drehzahlregelung für den Mähmotor. Die dritte Ebene (ganz hinten, oberer Bildrand) beherbergt die „Gehirne“ des Roboters und das Kompass-Beschleunigungs-Modul.

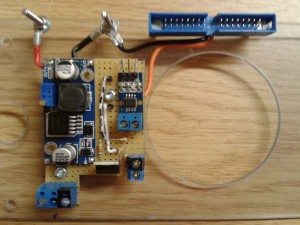 Hier die 5V Stromverteilung, um die Bauteile zu versorgen. Dafür wurde aus einem alten Mainboard eine IDE-Leiste ausgesägt, in der Mitte die Leiterplatte getrennt und jede Seite mit einem Kabel verbunden. Die beiden M3 Schrauben dienen der Hauptstromverteilung für die Fahrmotoren und dem Mähmotor.
Hier die 5V Stromverteilung, um die Bauteile zu versorgen. Dafür wurde aus einem alten Mainboard eine IDE-Leiste ausgesägt, in der Mitte die Leiterplatte getrennt und jede Seite mit einem Kabel verbunden. Die beiden M3 Schrauben dienen der Hauptstromverteilung für die Fahrmotoren und dem Mähmotor.
 Die untere Etage mit den beiden Fahrmotoren, dem Mähmotor, den beiden Motortreibern und Stromsensoren.
Die untere Etage mit den beiden Fahrmotoren, dem Mähmotor, den beiden Motortreibern und Stromsensoren.
.
.
.
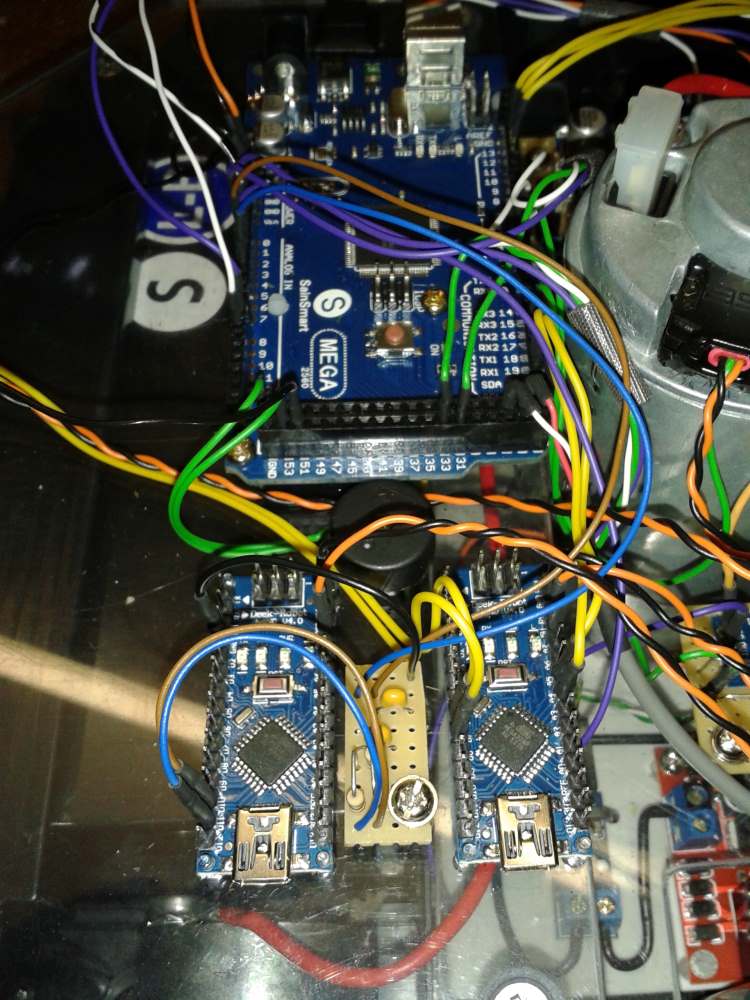 Hier die „Gehirn-Etage“.
Hier die „Gehirn-Etage“.
Hinten der Arduion Mega, vorne die beiden Arduino Nano für die Schleifenerkennung und das Kompass-Beschleunigungsmodul.
.
.
.
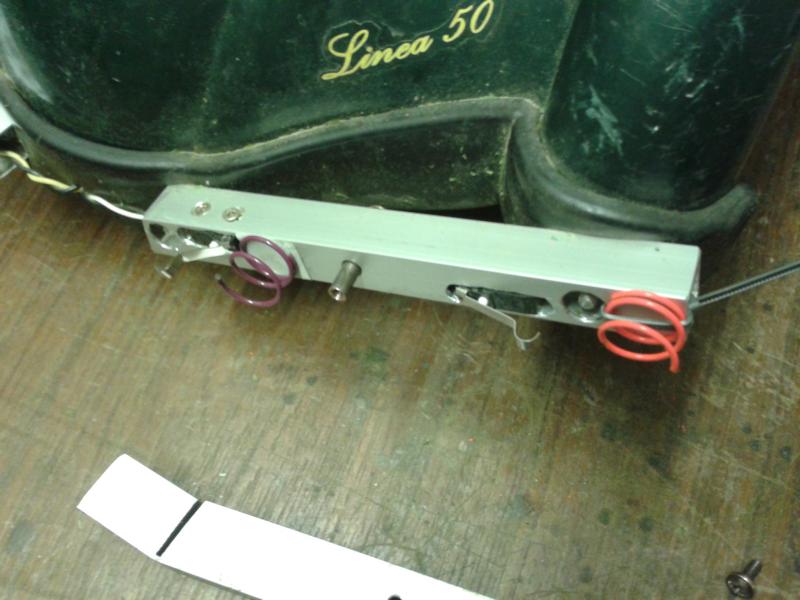
 Der Hauptschalter und rechts/links neben den Rädern die Spulen für die Schleifenerkennung.
Der Hauptschalter und rechts/links neben den Rädern die Spulen für die Schleifenerkennung.
Letztere habe ich aus 16er PG-Rohr gefertigt.
.

 Die Halterung für das Ultraschallmodul wurden ebenfalls aus 16er PG-Rohr gefertigt und fest verklebt. Das US-Modul kann so einfach von innen eingesteckt werden und so auch beim Abnehmen des Gehäuses wieder entnommen werden. Gleichzeitig sitzt es ein Stück zurück, um vor mechanischer Beschädigung geschützt zu sein.
Die Halterung für das Ultraschallmodul wurden ebenfalls aus 16er PG-Rohr gefertigt und fest verklebt. Das US-Modul kann so einfach von innen eingesteckt werden und so auch beim Abnehmen des Gehäuses wieder entnommen werden. Gleichzeitig sitzt es ein Stück zurück, um vor mechanischer Beschädigung geschützt zu sein.

 Alles fertig verkabelt. Schaut ziemlich wild aus, funktioniert aber.
Alles fertig verkabelt. Schaut ziemlich wild aus, funktioniert aber.
.
.
 Da ich der erste und größte Fan vom Ardumower bin, hier der zweite.
Da ich der erste und größte Fan vom Ardumower bin, hier der zweite.
Endlich hat die Katze auch einen Spielkameraden, sie findet den Ardumower super. Mal sehen wann sie mitfährt.
.
.
.
Das Ergebnis ist super! Noch ist das Projekt nicht abgeschlossen, es geht also weiter. Werde dies auch hier versuchen aktuell zu halten.
So, es geht weiter.
Die Anbringung der Empfängerspulen für die Schleifenerkennung war nicht optimal. Sie waren ja bisher vorne, unter dem Roby angebracht. Dadurch ist er des Öfteren hängen geblieben und sie wurden auch einmal abgerissen und vom Mähmesser gehäckselt 🙁
Die Spulen habe ich nun im Roboter angebracht und auch ein neues Verstärkermodul eingebaut. Bis her funktioniert das problemlos.

 .
.
.
.
.
Hier noch ein kleines Video von den Klettereigenschaften.
November 2015
Nach einer weiteren Mähsaison hat sich Cutty1 (ja es gibt bereits einen zweiten 🙂 ) erneut super geschlagen.
Im Frühjahr habe ich endlich das Provisorium der Pumper beendet und „richtige“ gebaut. Sie haben in diesem Sommer super Arbeit geleistet und fehlerfrei funktioniert.


Auch wurde der Ladeanschluss verändert. Die Ladung der
LiPos erfolgt nun über eine SUB-D Buchse und die Zellen
werden balanciert.
Das original Mähmesser habe ich durch einen Selbstbau ersetzt. Die Trapezklingen halten super, mir ist bei beiden Cuttys nur eine einzige in diesem Sommer abgebrochen. Auch die Standzeit ist genial. Bei beiden Robotern habe ich die Klingen bisher nicht gewechselt (klar, bis auf die abgebrochene). Sie sind zwar nicht mehr besonders scharf, aber scheinbar durch das dünne Material funktioniert der Schnitt trotz dem noch.


Hier sind beide im Einsatz.
Also, besucht unbedingt die ARDUMOWER-Seiten. Es lohnt sich!